다중 이용 시설에서 신발 분실·도난이 반복된다면?
요양원이나 고령자 가정에서 허리를 굽혀 신발을 정리해야 한다면?
요양원이나 고령자 가정에서 허리를 굽혀 신발을 정리해야 한다면?
비접촉 지문 인식만으로 신발을 자동 보관하고 반납하는 로봇 시스템입니다. 동서대학교 캡스톤 디자인 프로젝트로, 설계부터 펌웨어·제작까지 직접 수행했습니다.
지문 등록
→
신발 자동 보관
→
지문 인식
→
신발 자동 반납
📅 1년 · 2022.06–2023.06
🏫 동서대학교 캡스톤 디자인
- 최초 등록 — 사용자가 지문인식 센서에 지문을 등록
- 보관 — 신발을 발판에 두면 로봇이 자동으로 신발을 집어 신발장으로 이송·보관
- 반납 — 지문인식 센서에 지문을 인식하면 보관 위치에서 신발을 꺼내 사용자 앞으로 배출
| 분류 | 기술 |
|---|---|
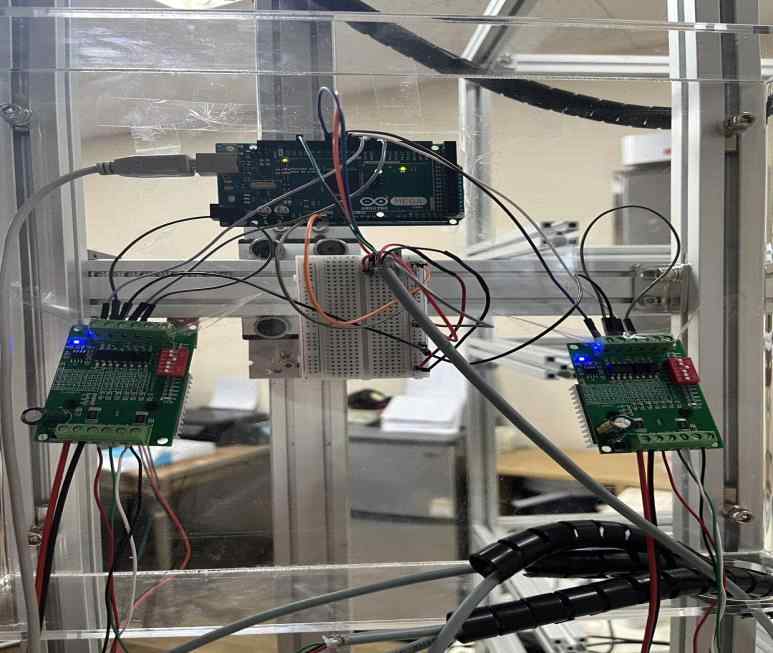
| Embedded Firmware | Arduino Mega2560(C++), 모터/액추에이터 PID 제어, 전자석·SSR 릴레이 구동 |
| 통신 | UART-WiFi 브리지로 Raspberry Pi와 MQTT / REST API 통신 |
| Digital Fabrication | SolidWorks → FDM 3D 프린팅, 40W CO₂ Laser Cutting으로 섀시·HMI 베젤 제작 |
| Edge-HMI | Raspberry Pi + Capacitive Touch LCD, Python으로 슬롯 DB 관리·서버 운용, WebSocket 실시간 피드백 |
| Mobile App | MIT App Inventor로 지문 인증 → Slot ID 요청 → MQTT Pub/Sub로 로봇 제어 |
SolidWorks로 프레임을 설계하고 알루미늄 프로파일을 재단하여 조립했습니다. 초기 원형 디자인에서 축 회전 구현에 어려움이 있어 사각 구조로 변경했습니다.
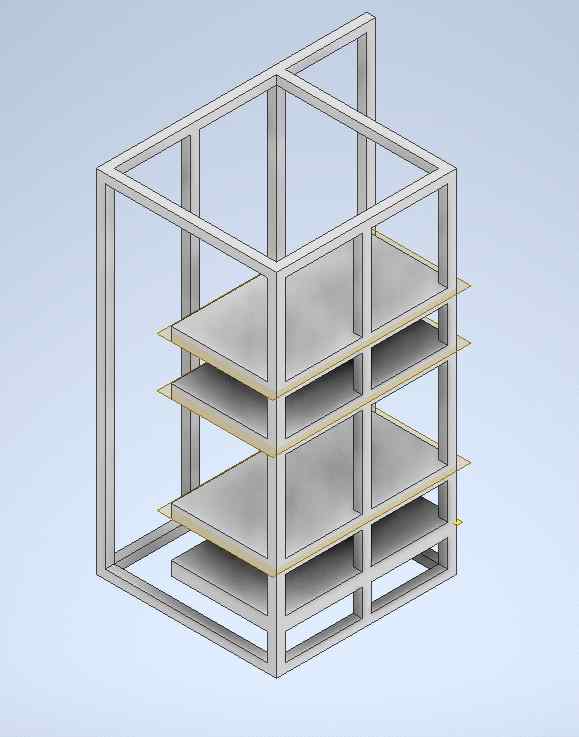
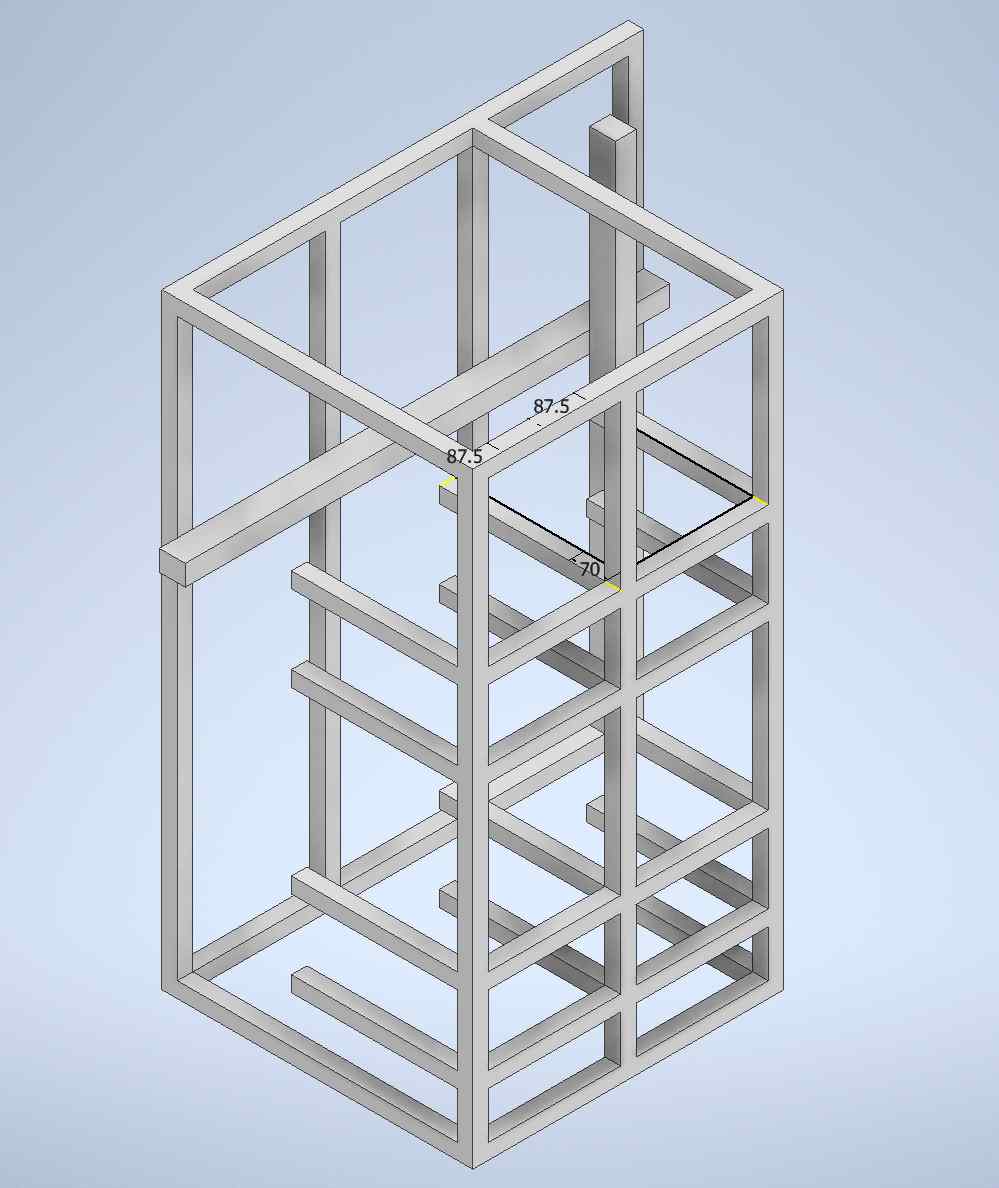


프로파일 구성:
- 1170mm × 7개, 540mm × 4개, 320mm × 12개, 270mm × 2개, 255mm × 16개 — 총 41개
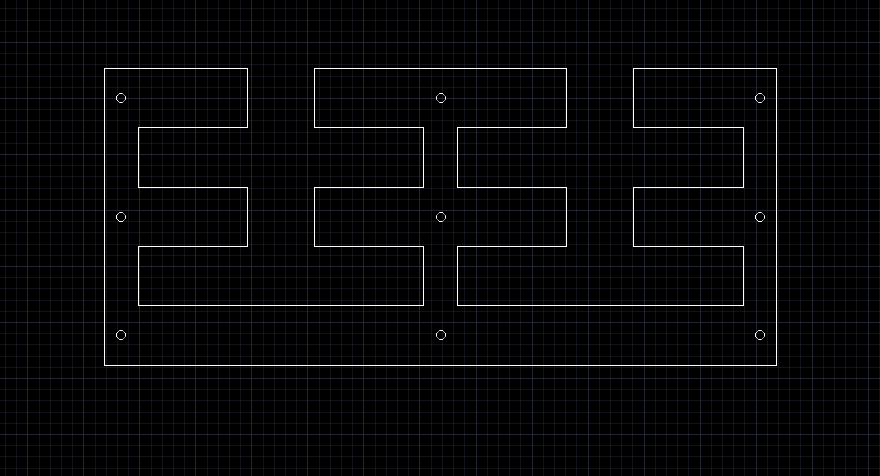
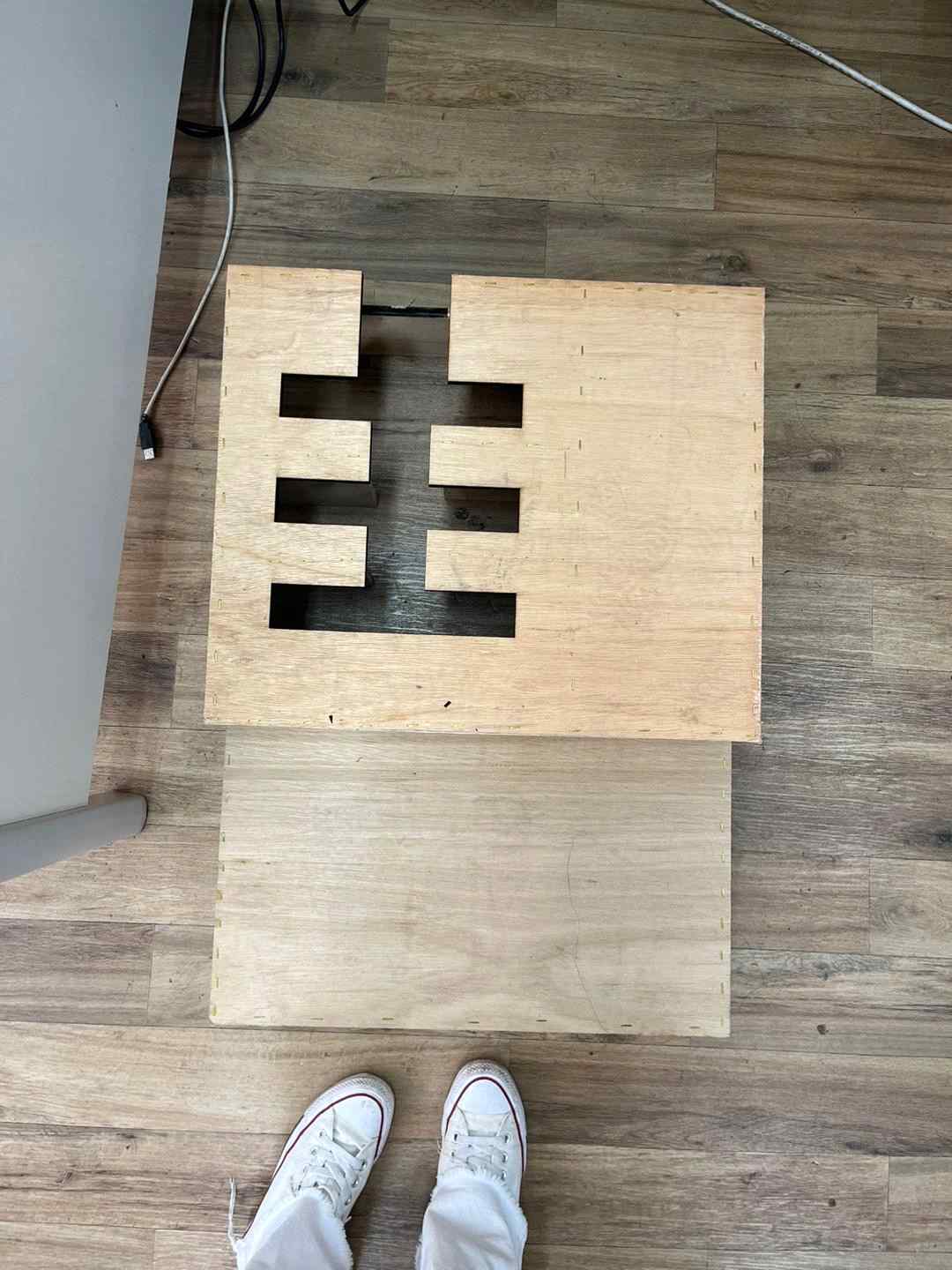
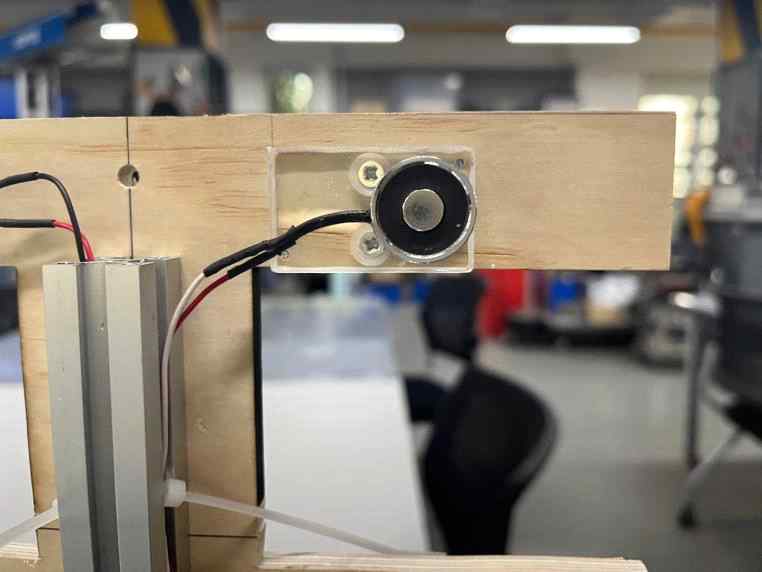
발판은 CO₂ 레이저 커팅으로 제작하고, 하단에 전자석을 부착했습니다. 슬리퍼 속에 철판을 넣어 전자석으로 신발을 고정하는 방식입니다.
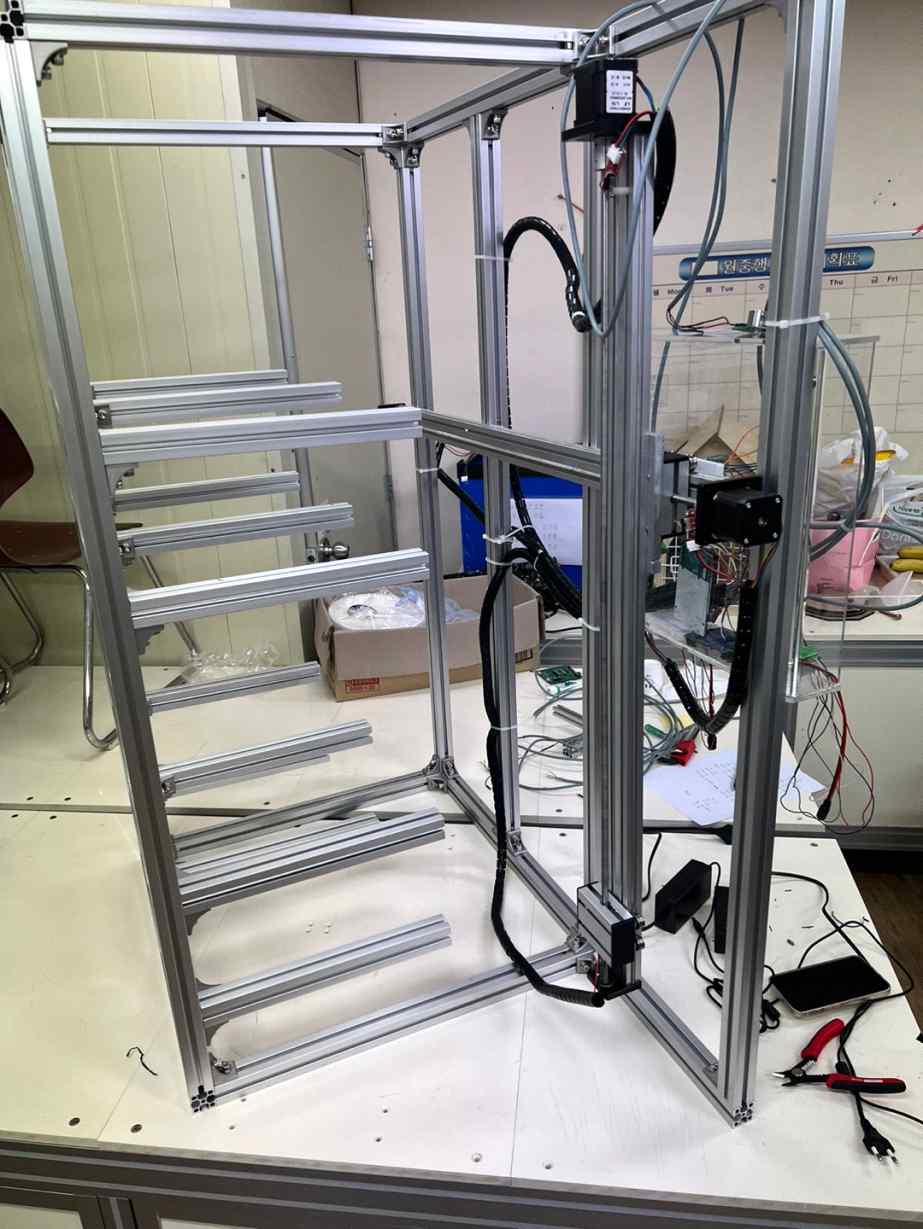
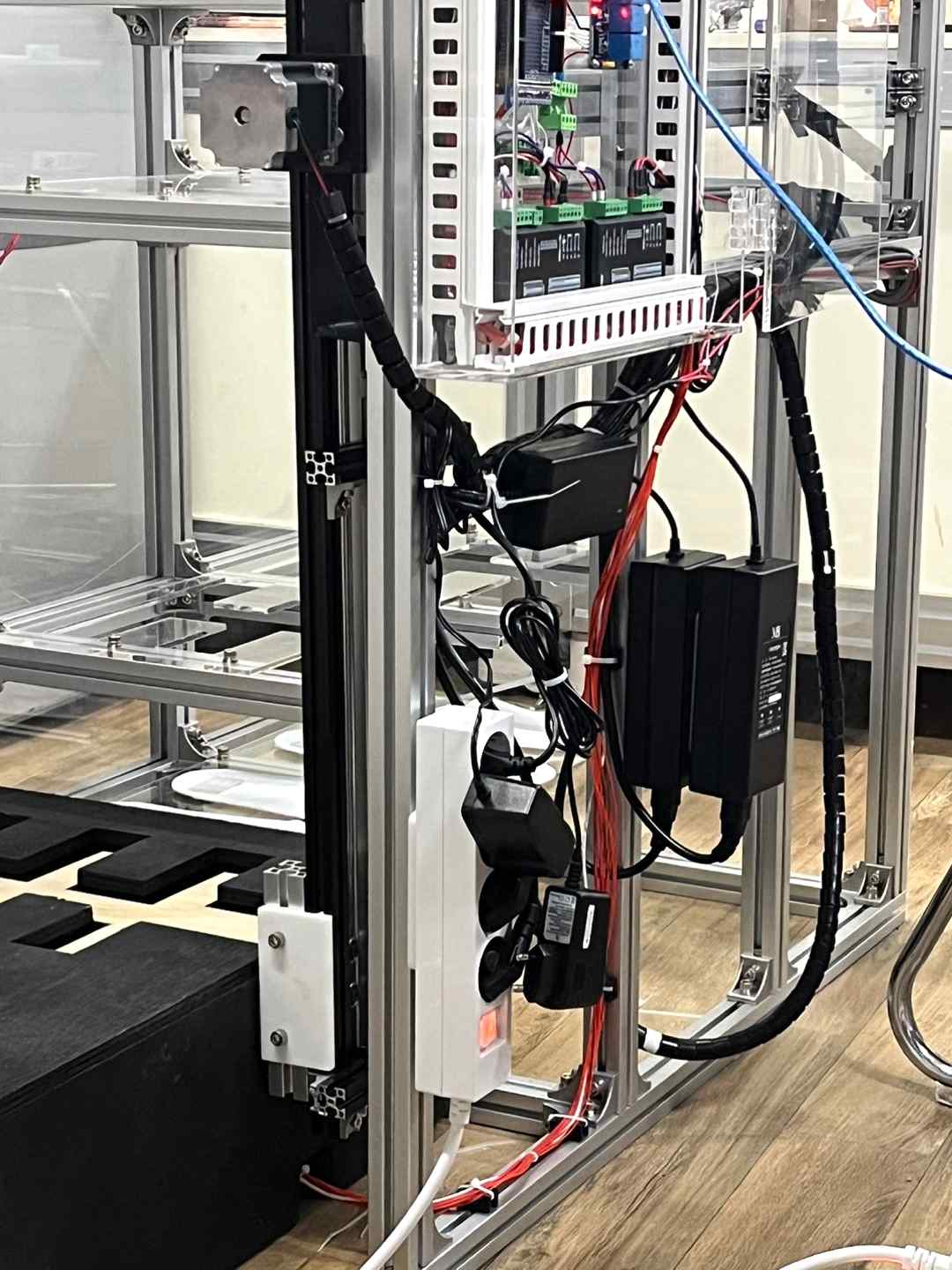
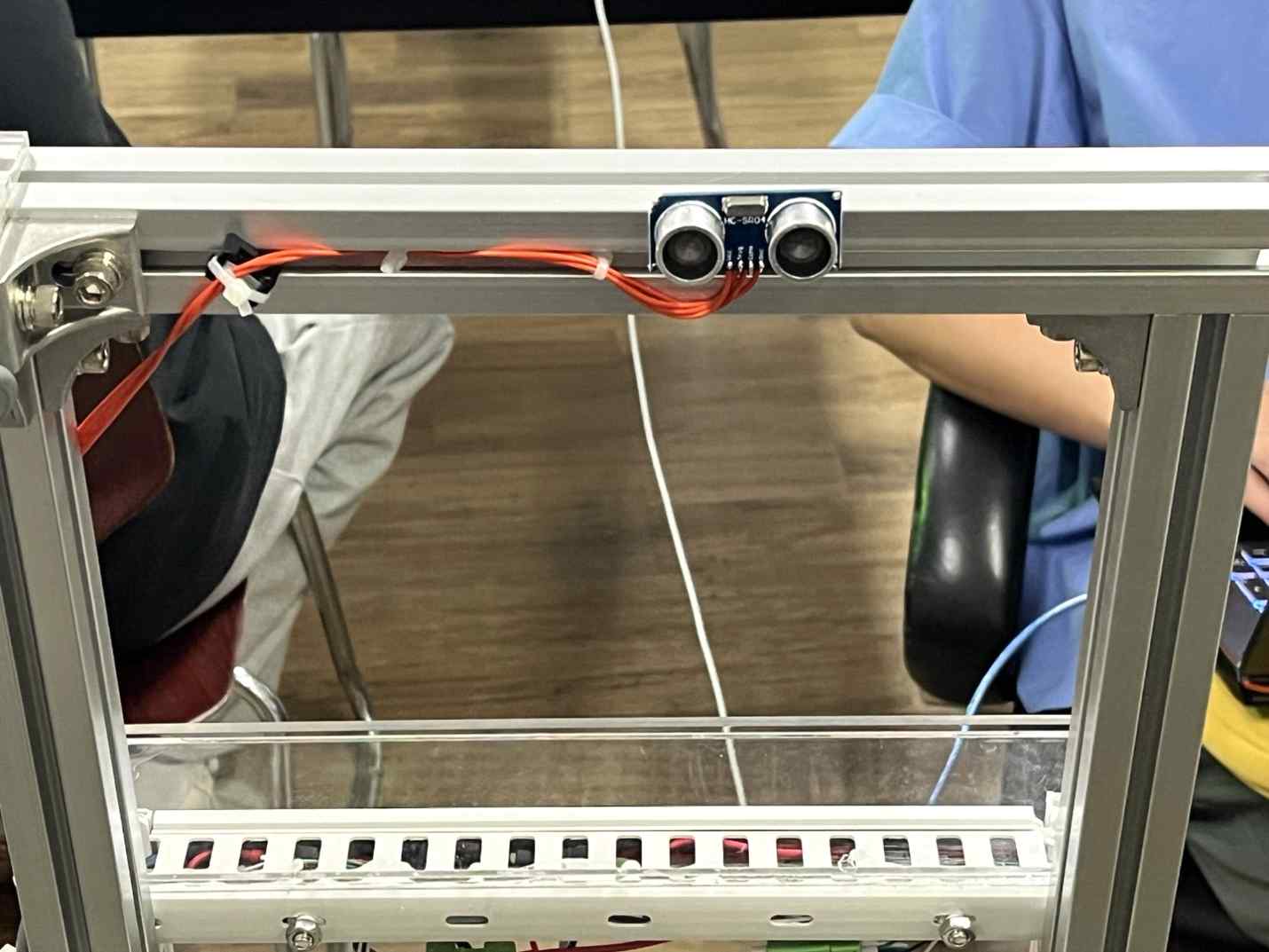
리니어 레일과 릴레이로 체적인 배선을 구성하고, 리미트스위치로 왕복 구동을 제어했습니다.
도색 작업과 UV-C 멸균 모듈 부착까지 완료한 최종 완성품입니다.

- Ergonomic Benefit — 허리 굴곡 각도 0° 유지, 근·골격계 부담 70% 감소 (모션 캡처 실험)
- Theft Prevention — 개별 잠금식 보관 + 로그 기록으로 분실률 0건 실증
- Infection Control — UV-C 멸균으로 무좀균(Trichophyton spp.) 3분 내 99% 제거